Corner φ general equations A 1 x + B 1 y + C 1 = 0 and A 2 x + B 2 y + C 2 = 0, calculated by the formula:
Corner φ between two lines given canonical equations(x-x 1)/m 1 = (y-y 1)/n 1 and (x-x 2)/m 2 = (y-y 2)/n 2, calculated by the formula:
![]()
Distance from point to line

Each plane in space can be represented as linear equation, called general equation plane
Special cases.
o If in equation (8) , then the plane passes through the origin.
o When (,) the plane is parallel to the axis (axis, axis), respectively.
o When (,) the plane is parallel to the plane (plane, plane).
Solution: use (7)

Answer: general plane equation.
Example.
A plane in the rectangular coordinate system Oxyz is given by the general equation of the plane ![]() . Write down the coordinates of all normal vectors of this plane.
. Write down the coordinates of all normal vectors of this plane.
We know that the coefficients of the variables x, y and z in the general equation of a plane are the corresponding coordinates of the normal vector of this plane. Therefore, the normal vector of a given plane ![]() has coordinates. The set of all normal vectors can be defined as:
has coordinates. The set of all normal vectors can be defined as:
Write the equation of the plane if in the rectangular coordinate system Oxyz in space it passes through the point ![]() , A
, A ![]() is the normal vector of this plane.
is the normal vector of this plane.
We present two solutions to this problem.
From the condition we have . We substitute this data into the general equation of the plane passing through the point:
Write the general equation of a plane parallel to the coordinate plane Oyz and passing through the point ![]() .
.
A plane that is parallel to the coordinate plane Oyz can be given by a general incomplete plane equation of the form . Since the point ![]() belongs to the plane by condition, then the coordinates of this point must satisfy the equation of the plane, that is, the equality must be true. From here we find. Thus, the required equation has the form.
belongs to the plane by condition, then the coordinates of this point must satisfy the equation of the plane, that is, the equality must be true. From here we find. Thus, the required equation has the form.
Solution. The cross product, by definition 10.26, is orthogonal to the vectors p and q. Consequently, it is orthogonal to the desired plane and the vector can be taken as its normal vector. Let's find the coordinates of vector n:

that is ![]() . Using formula (11.1), we obtain
. Using formula (11.1), we obtain
By opening the brackets in this equation, we arrive at the final answer.
Answer: ![]() .
.
Let's rewrite the normal vector in the form and find its length:
According to the above:
Answer: ![]()
Parallel planes have the same normal vector. 1) From the equation we find the normal vector of the plane:.
2) Let’s compose the equation of the plane using the point and normal vector: 
Answer:
Vector equation of a plane in space
Parametric equation of a plane in space
Equation of a plane passing through a given point perpendicular to a given vector
Let a rectangular Cartesian coordinate system be given in three-dimensional space. Let us formulate the following problem:
Write an equation for a plane passing through a given point M(x 0, y 0, z 0) perpendicular to the given vector n = ( A, B, C} .
Solution. Let P(x, y, z) is an arbitrary point in space. Dot P belongs to the plane if and only if the vector MP = {x − x 0, y − y 0, z − z 0) orthogonal to the vector n = {A, B, C) (Fig. 1).

Having written the condition for the orthogonality of these vectors (n, MP) = 0 in coordinate form, we get:
|
A(x − x 0) + B(y − y 0) + C(z − z 0) = 0 |
Equation of a plane using three points
In vector form
![]()
In coordinates




Mutual arrangement of planes in space
– general equations of two planes. Then:
1) if ![]() , then the planes coincide;
, then the planes coincide;
2) if ![]() , then the planes are parallel;
, then the planes are parallel;
3) if or , then the planes intersect and the system of equations
![]() (6)
(6)
are the equations of the straight line of intersection of these planes.

|
Solution: We compose the canonical equations of the line using the formula: Answer: |
We take the resulting equations and mentally “pinch off”, for example, the left piece: . Now let's equate this piece to any number(remember that there was already a zero), for example, to one: . Since , then the other two “pieces” should also be equal to one. Essentially, you need to solve the system: |


Compose parametric equations of the following straight lines: 

Solution: Lines are given by canonical equations and at the first stage you should find some point belonging to the line and its direction vector.
a) From the equations ![]() remove the point and the direction vector: . You can choose another point (how to do this is described above), but it is better to take the most obvious one. By the way, to avoid mistakes, always substitute its coordinates into the equations.
remove the point and the direction vector: . You can choose another point (how to do this is described above), but it is better to take the most obvious one. By the way, to avoid mistakes, always substitute its coordinates into the equations.
Let's create parametric equations for this line: 
The convenience of parametric equations is that they make it very easy to find other points on a line. For example, let's find a point whose coordinates, say, correspond to the value of the parameter: 
Thus: b) Consider the canonical equations ![]() . Choosing a point here is not difficult, but treacherous: (be careful not to confuse the coordinates!!!). How to remove the guide vector? You can speculate about what this line is parallel to, or you can use a simple formal technique: the proportion contains “Y” and “Z”, so we write down the direction vector , and put a zero in the remaining space: .
. Choosing a point here is not difficult, but treacherous: (be careful not to confuse the coordinates!!!). How to remove the guide vector? You can speculate about what this line is parallel to, or you can use a simple formal technique: the proportion contains “Y” and “Z”, so we write down the direction vector , and put a zero in the remaining space: .
Let's compose the parametric equations of the straight line: 
c) Let’s rewrite the equations in the form , that is, “zet” can be anything. And if by any, then let, for example, . Thus, the point belongs to this line. To find the direction vector, we use the following formal technique: in the original equations there are “x” and “y”, and in the direction vector at these places we write zeros: . In the remaining space we put unit: . Instead of one, any number except zero will do.
Let's write down the parametric equations of the straight line: 
Problem 1
Find the cosine of the angle between the lines $\frac(x+3)(5) =\frac(y-2)(-3) =\frac(z-1)(4) $ and $\left\(\begin(array )(c) (x=2\cdot t-3) \\ (y=-t+1) \\ (z=3\cdot t+5) \end(array)\right. $.
Let two lines be given in space: $\frac(x-x_(1) )(m_(1) ) =\frac(y-y_(1) )(n_(1) ) =\frac(z-z_(1 ) )(p_(1) ) $ and $\frac(x-x_(2) )(m_(2) ) =\frac(y-y_(2) )(n_(2) ) =\frac(z- z_(2) )(p_(2) ) $. Let's choose an arbitrary point in space and draw through it two auxiliary lines parallel to the data. The angle between these lines is any of the two adjacent angles formed by the auxiliary lines. The cosine of one of the angles between straight lines can be found using the well-known formula $\cos \phi =\frac(m_(1) \cdot m_(2) +n_(1) \cdot n_(2) +p_(1) \cdot p_( 2) )(\sqrt(m_(1)^(2) +n_(1)^(2) +p_(1)^(2) ) \cdot \sqrt(m_(2)^(2) +n_( 2)^(2) +p_(2)^(2) ) ) $. If the value $\cos \phi >0$, then an acute angle between the lines is obtained, if $\cos \phi
Canonical equations of the first line: $\frac(x+3)(5) =\frac(y-2)(-3) =\frac(z-1)(4) $.
The canonical equations of the second line can be obtained from the parametric ones:
\ \ \
Thus, the canonical equations of this line are: $\frac(x+3)(2) =\frac(y-1)(-1) =\frac(z-5)(3) $.
We calculate:
\[\cos \phi =\frac(5\cdot 2+\left(-3\right)\cdot \left(-1\right)+4\cdot 3)(\sqrt(5^(2) +\ left(-3\right)^(2) +4^(2) ) \cdot \sqrt(2^(2) +\left(-1\right)^(2) +3^(2) ) = \frac(25)(\sqrt(50) \cdot \sqrt(14) ) \approx 0.9449.\]
Problem 2
The first line passes through the given points $A\left(2,-4,-1\right)$ and $B\left(-3,5,6\right)$, the second line passes through the given points $C\left (1,-2,8\right)$ and $D\left(6,7,-2\right)$. Find the distance between these lines.
Let a certain line be perpendicular to the lines $AB$ and $CD$ and intersect them at points $M$ and $N$, respectively. Under these conditions, the length of the segment $MN$ is equal to the distance between the lines $AB$ and $CD$.
We construct the vector $\overline(AB)$:
\[\overline(AB)=\left(-3-2\right)\cdot \bar(i)+\left(5-\left(-4\right)\right)\cdot \bar(j)+ \left(6-\left(-1\right)\right)\cdot \bar(k)=-5\cdot \bar(i)+9\cdot \bar(j)+7\cdot \bar(k ).\]
Let the segment depicting the distance between the lines pass through the point $M\left(x_(M) ,y_(M) ,z_(M) \right)$ on the line $AB$.
We construct the vector $\overline(AM)$:
\[\overline(AM)=\left(x_(M) -2\right)\cdot \bar(i)+\left(y_(M) -\left(-4\right)\right)\cdot \ bar(j)+\left(z_(M) -\left(-1\right)\right)\cdot \bar(k)=\] \[=\left(x_(M) -2\right)\ cdot \bar(i)+\left(y_(M) +4\right)\cdot \bar(j)+\left(z_(M) +1\right)\cdot \bar(k).\]
The vectors $\overline(AB)$ and $\overline(AM)$ are the same, therefore they are collinear.
It is known that if the vectors $\overline(a)=x_(1) \cdot \overline(i)+y_(1) \cdot \overline(j)+z_(1) \cdot \overline(k)$ and $ \overline(b)=x_(2) \cdot \overline(i)+y_(2) \cdot \overline(j)+z_(2) \cdot \overline(k)$ are collinear, then their coordinates are proportional, then there is $\frac(x_((\it 2)) )((\it x)_((\it 1)) ) =\frac(y_((\it 2)) )((\it y)_( (\it 1)) ) =\frac(z_((\it 2)) )((\it z)_((\it 1)) ) $.
$\frac(x_(M) -2)(-5) =\frac(y_(M) +4)(9) =\frac(z_(M) +1)(7) =m$, where $m $ is the result of division.
From here we get: $x_(M) -2=-5\cdot m$; $y_(M) +4=9\cdot m$; $z_(M) +1=7\cdot m$.
We finally obtain expressions for the coordinates of point $M$:
We construct the vector $\overline(CD)$:
\[\overline(CD)=\left(6-1\right)\cdot \bar(i)+\left(7-\left(-2\right)\right)\cdot \bar(j)+\ left(-2-8\right)\cdot \bar(k)=5\cdot \bar(i)+9\cdot \bar(j)-10\cdot \bar(k).\]
Let the segment representing the distance between the lines pass through the point $N\left(x_(N) ,y_(N) ,z_(N) \right)$ on the line $CD$.
We construct the vector $\overline(CN)$:
\[\overline(CN)=\left(x_(N) -1\right)\cdot \bar(i)+\left(y_(N) -\left(-2\right)\right)\cdot \ bar(j)+\left(z_(N) -8\right)\cdot \bar(k)=\] \[=\left(x_(N) -1\right)\cdot \bar(i)+ \left(y_(N) +2\right)\cdot \bar(j)+\left(z_(N) -8\right)\cdot \bar(k).\]
The vectors $\overline(CD)$ and $\overline(CN)$ coincide, therefore, they are collinear. We apply the condition of collinearity of vectors:
$\frac(x_(N) -1)(5) =\frac(y_(N) +2)(9) =\frac(z_(N) -8)(-10) =n$, where $n $ is the result of division.
From here we get: $x_(N) -1=5\cdot n$; $y_(N) +2=9\cdot n$; $z_(N) -8=-10\cdot n$.
We finally obtain expressions for the coordinates of point $N$:
We construct the vector $\overline(MN)$:
\[\overline(MN)=\left(x_(N) -x_(M) \right)\cdot \bar(i)+\left(y_(N) -y_(M) \right)\cdot \bar (j)+\left(z_(N) -z_(M) \right)\cdot \bar(k).\]
We substitute expressions for the coordinates of points $M$ and $N$:
\[\overline(MN)=\left(1+5\cdot n-\left(2-5\cdot m\right)\right)\cdot \bar(i)+\] \[+\left(- 2+9\cdot n-\left(-4+9\cdot m\right)\right)\cdot \bar(j)+\left(8-10\cdot n-\left(-1+7\cdot m\right)\right)\cdot \bar(k).\]
Having completed the steps, we get:
\[\overline(MN)=\left(-1+5\cdot n+5\cdot m\right)\cdot \bar(i)+\left(2+9\cdot n-9\cdot m\right )\cdot \bar(j)+\left(9-10\cdot n-7\cdot m\right)\cdot \bar(k).\]
Since the lines $AB$ and $MN$ are perpendicular, the scalar product of the corresponding vectors is equal to zero, that is, $\overline(AB)\cdot \overline(MN)=0$:
\[-5\cdot \left(-1+5\cdot n+5\cdot m\right)+9\cdot \left(2+9\cdot n-9\cdot m\right)+7\cdot \ left(9-10\cdot n-7\cdot m\right)=0;\] \
Having completed the steps, we obtain the first equation for determining $m$ and $n$: $155\cdot m+14\cdot n=86$.
Since the lines $CD$ and $MN$ are perpendicular, the scalar product of the corresponding vectors is equal to zero, that is, $\overline(CD)\cdot \overline(MN)=0$:
\ \[-5+25\cdot n+25\cdot m+18+81\cdot n-81\cdot m-90+100\cdot n+70\cdot m=0.\]
Having completed the steps, we obtain the second equation for determining $m$ and $n$: $14\cdot m+206\cdot n=77$.
We find $m$ and $n$ by solving the system of equations $\left\(\begin(array)(c) (155\cdot m+14\cdot n=86) \\ (14\cdot m+206\cdot n =77)\end(array)\right.$.
We apply the Cramer method:
\[\Delta =\left|\begin(array)(cc) (155) & (14) \\ (14) & (206) \end(array)\right|=31734; \] \[\Delta _(m) =\left|\begin(array)(cc) (86) & (14) \\ (77) & (206) \end(array)\right|=16638; \] \[\Delta _(n) =\left|\begin(array)(cc) (155) & (86) \\ (14) & (77) \end(array)\right|=10731;\ ]\
Find the coordinates of points $M$ and $N$:
\ \
Finally:
Finally, we write the vector $\overline(MN)$:
$\overline(MN)=\left(2.691-\left(-0.6215\right)\right)\cdot \bar(i)+\left(1.0438-0.7187\right)\cdot \bar (j)+\left(4.618-2.6701\right)\cdot \bar(k)$ or $\overline(MN)=3.3125\cdot \bar(i)+0.3251\cdot \bar( j)+1.9479\cdot \bar(k)$.
The distance between lines $AB$ and $CD$ is the length of the vector $\overline(MN)$:$d=\sqrt(3.3125^(2) +0.3251^(2) +1.9479^( 2) ) \approx 3.8565$ lin. units
Angle between straight lines in space we will call any of the adjacent angles formed by two straight lines drawn through an arbitrary point parallel to the data.
Let two lines be given in space:
Obviously, the angle φ between straight lines can be taken as the angle between their direction vectors and . Since , then using the formula for the cosine of the angle between vectors we get
The conditions of parallelism and perpendicularity of two straight lines are equivalent to the conditions of parallelism and perpendicularity of their direction vectors and:
Two straight parallel if and only if their corresponding coefficients are proportional, i.e. l 1 parallel l 2 if and only if parallel ![]() .
.
Two straight perpendicular if and only if the sum of the products of the corresponding coefficients is equal to zero: .
U goal between line and plane
Let it be straight d- not perpendicular to the θ plane;
d′− projection of a line d to the θ plane;
The smallest angle between straight lines d And d′ we will call angle between a straight line and a plane.
Let us denote it as φ=( d,θ)
If d⊥θ, then ( d,θ)=π/2

Oi→j→k→− rectangular coordinate system.
Plane equation:
θ: Ax+By+Cz+D=0
We assume that the straight line is defined by a point and a direction vector: d[M 0,p→]
Vector n→(A,B,C)⊥θ
Then it remains to find out the angle between the vectors n→ and p→, let us denote it as γ=( n→,p→).
If the angle γ<π/2 , то искомый угол φ=π/2−γ .
If the angle is γ>π/2, then the desired angle is φ=γ−π/2
sinφ=sin(2π−γ)=cosγ
sinφ=sin(γ−2π)=−cosγ
Then, angle between straight line and plane can be calculated using the formula:
sinφ=∣cosγ∣=∣ ∣ Ap 1+Bp 2+Cp 3∣ ∣ √A 2+B 2+C 2√p 21+p 22+p 23
Question29. The concept of quadratic form. Sign definiteness of quadratic forms.
Quadratic form j (x 1, x 2, …, x n) n real variables x 1, x 2, …, x n is called a sum of the form 
 , (1)
, (1)
Where a ij – some numbers called coefficients. Without loss of generality, we can assume that a ij = a ji.
The quadratic form is called valid, If a ij
Î GR. Matrix of quadratic form is called a matrix made up of its coefficients. The quadratic form (1) corresponds to the only symmetric matrix  That is A T = A. Hence, quadratic form(1) can be written in matrix form j ( X) = x T Ah, Where x T = (X 1 X 2 … x n). (2)
That is A T = A. Hence, quadratic form(1) can be written in matrix form j ( X) = x T Ah, Where x T = (X 1 X 2 … x n). (2)
And, conversely, every symmetric matrix (2) corresponds to a unique quadratic form up to the notation of variables.
Rank of quadratic form is called the rank of its matrix. The quadratic form is called non-degenerate, if its matrix is non-singular A. (recall that the matrix A is called non-degenerate if its determinant is not equal to zero). Otherwise, the quadratic form is degenerate.
positive definite(or strictly positive) if
j ( X) > 0 , for anyone X = (X 1 , X 2 , …, x n), except X = (0, 0, …, 0).
Matrix A positive definite quadratic form j ( X) is also called positive definite. Therefore, a positive definite quadratic form corresponds to a unique positive definite matrix and vice versa.
The quadratic form (1) is called negatively defined(or strictly negative) if
j ( X) < 0, для любого X = (X 1 , X 2 , …, x n), except X = (0, 0, …, 0).
Similarly as above, a matrix of negative definite quadratic form is also called negative definite.
Consequently, the positive (negative) definite quadratic form j ( X) reaches the minimum (maximum) value j ( X*) = 0 at X* = (0, 0, …, 0).
Note that most of quadratic forms are not sign-definite, that is, they are neither positive nor negative. Such quadratic forms vanish not only at the origin of the coordinate system, but also at other points.
When n> 2, special criteria are required to check the sign of a quadratic form. Let's look at them.
Major minors quadratic form are called minors:


that is, these are minors of the order of 1, 2, ..., n matrices A, located in the left top corner, the last of them coincides with the determinant of the matrix A.
Positive Definiteness Criterion (Sylvester criterion)
X) = x T Ah was positive definite, it is necessary and sufficient that all major minors of the matrix A were positive, that is: M 1 > 0, M 2 > 0, …, Mn > 0. Negative certainty criterion In order for the quadratic form j ( X) = x T Ah was negative definite, it is necessary and sufficient that its principal minors of even order be positive, and of odd order - negative, i.e.: M 1 < 0, M 2 > 0, M 3 < 0, …, (–1)n
Let two straight lines l and m on a plane in a Cartesian coordinate system be given by general equations: l: A 1 x + B 1 y + C 1 = 0, m: A 2 x + B 2 y + C 2 = 0
Normal vectors to these lines: = (A 1 , B 1) – to line l,
= (A 2 , B 2) – to line m.
Let j be the angle between lines l and m.


Since the angles with are mutual perpendicular sides are either equal or add up to p, then ![]() , that is, cos j = .
, that is, cos j = .
So, we have proven the following theorem.
Theorem. Let j be the angle between two lines on the plane, and let these lines be specified in the Cartesian coordinate system by the general equations A 1 x + B 1 y + C 1 = 0 and A 2 x + B 2 y + C 2 = 0. Then cos j =  .
.
Exercises.
1) Derive a formula for calculating the angle between straight lines if:
(1) both lines are specified parametrically; (2) both lines are given by canonical equations; (3) one line is specified parametrically, the other line is specified by a general equation; (4) both lines are given by an equation with an angular coefficient.
2) Let j be the angle between two straight lines on a plane, and let these straight lines be defined in a Cartesian coordinate system by the equations y = k 1 x + b 1 and y =k 2 x + b 2 .
Then tan j = .
3) Explore the relative position of two straight lines, given by general equations in the Cartesian coordinate system, and fill out the table:
The distance from a point to a straight line on a plane.
Let the straight line l on a plane in the Cartesian coordinate system be given by the general equation Ax + By + C = 0. Let us find the distance from the point M(x 0 , y 0) to the straight line l.
The distance from point M to straight line l is the length of the perpendicular HM (H О l, HM ^ l).

The vector and the normal vector to the line l are collinear, so | | = | | | | and | | = .
Let the coordinates of the point H be (x,y).
Since the point H belongs to the line l, then Ax + By + C = 0 (*).
Coordinates of vectors and: = (x 0 - x, y 0 - y), = (A, B).
| | = ![]() =
= ![]() =
= ![]()
(C = -Ax - By, see (*))
Theorem. Let the straight line l be specified in the Cartesian coordinate system by the general equation Ax + By + C = 0. Then the distance from the point M(x 0 , y 0) to this straight line is calculated by the formula: r (M; l) = ![]() .
.
Exercises.
1) Derive a formula for calculating the distance from a point to a line if: (1) the line is given parametrically; (2) the line is given to the canonical equations; (3) the straight line is given by an equation with an angular coefficient.
2) Write the equation of a circle tangent to the line 3x – y = 0, with center at point Q(-2,4).
3) Write the equations of the lines dividing the angles formed by the intersection of the lines 2x + y - 1 = 0 and x + y + 1 = 0, in half.
§ 27. Analytical definition of a plane in space
Definition. The normal vector to the plane we will call a non-zero vector, any representative of which is perpendicular to a given plane.
Comment. It is clear that if at least one representative of the vector is perpendicular to the plane, then all other representatives of the vector are perpendicular to this plane.
Let a Cartesian coordinate system be given in space.
Let a plane be given, = (A, B, C) – the normal vector to this plane, point M (x 0 , y 0 , z 0) belongs to plane a.

For any point N(x, y, z) of plane a, the vectors and are orthogonal, that is, their scalar product is equal to zero: = 0. Let us write the last equality in coordinates: A(x - x 0) + B(y - y 0) + C(z - z 0) = 0.
Let -Ax 0 - By 0 - Cz 0 = D, then Ax + By + Cz + D = 0.
Let us take a point K (x, y) such that Ax + By + Cz + D = 0. Since D = -Ax 0 - By 0 - Cz 0, then A(x - x 0) + B(y - y 0) + C(z - z 0) = 0. Since the coordinates of the directed segment = (x - x 0, y - y 0, z - z 0), the last equality means that ^, and, therefore, K О a.
So, we have proven the following theorem:
Theorem. Any plane in space in a Cartesian coordinate system can be specified by an equation of the form Ax + By + Cz + D = 0 (A 2 + B 2 + C 2 ≠ 0), where (A, B, C) are the coordinates of the normal vector to this plane.
The opposite is also true.
Theorem. Any equation of the form Ax + By + Cz + D = 0 (A 2 + B 2 + C 2 ≠ 0) in the Cartesian coordinate system specifies a certain plane, and (A, B, C) are the coordinates of the normal vector to this plane.
Proof.
Take a point M (x 0 , y 0 , z 0) such that Ax 0 + By 0 + Cz 0 + D = 0 and vector = (A, B, C) ( ≠ q).
A plane (and only one) passes through point M perpendicular to the vector. According to the previous theorem, this plane is given by the equation Ax + By + Cz + D = 0.
Definition. An equation of the form Ax + By + Cz + D = 0 (A 2 + B 2 + C 2 ≠ 0) is called general plane equation.
Example.
Let's write the equation of the plane passing through the points M (0,2,4), N (1,-1,0) and K (-1,0,5).
1. Find the coordinates of the normal vector to the plane (MNK). Since the vector product ´ is orthogonal to the non-collinear vectors and , then the vector is collinear ´ .
= (1, -3, -4), = (-1, -2, 1);
´ =  ,
,
´ = (-11, 3, -5).
So, as the normal vector we take the vector = (-11, 3, -5).
2. Let us now use the results of the first theorem:
equation of this plane A(x - x 0) + B(y - y 0) + C(z - z 0) = 0, where (A, B, C) are the coordinates of the normal vector, (x 0 , y 0 , z 0) – coordinates of a point lying in the plane (for example, point M).
11(x - 0) + 3(y - 2) - 5(z - 4) = 0
11x + 3y – 5z + 14 = 0
Answer: -11x + 3y - 5z + 14 = 0.
Exercises.
1) Write the equation of the plane if
(1) the plane passes through the point M (-2,3,0) parallel to the plane 3x + y + z = 0;
(2) the plane contains the (Ox) axis and is perpendicular to the x + 2y – 5z + 7 = 0 plane.
2) Write the equation of the plane passing through the three given points.
§ 28. Analytical definition of a half-space*
Comment*. Let some plane be fixed. Under half-space we will understand the set of points lying on one side of a given plane, that is, two points lie in the same half-space if the segment connecting them does not intersect the given plane. This plane is called the border of this half-space. The union of this plane and half-space will be called closed half-space.
Let a Cartesian coordinate system be fixed in space.
Theorem. Let the plane a be given by the general equation Ax + By + Cz + D = 0. Then one of the two half-spaces into which the plane a divides the space is given by the inequality Ax + By + Cz + D > 0, and the second half-space is given by the inequality Ax + By + Cz + D< 0.
Proof.
Let us plot the normal vector = (A, B, C) to the plane a from the point M (x 0 , y 0 , z 0) lying on this plane: = , M О a, MN ^ a. The plane divides space into two half-spaces: b 1 and b 2. It is clear that point N belongs to one of these half-spaces. Without loss of generality, we will assume that N О b 1 .

Let us prove that the half-space b 1 is defined by the inequality Ax + By + Cz + D > 0.
1) Take a point K(x,y,z) in the half-space b 1 . Angle Ð NMK is the angle between the vectors and - acute, therefore the scalar product of these vectors is positive: > 0. Let us write this inequality in coordinates: A(x - x 0) + B(y - y 0) + C(z - z 0) > 0, that is, Ax + By + Cy - Ax 0 - By 0 - C z 0 > 0.
Since M О b 1, then Ax 0 + By 0 + C z 0 + D = 0, therefore -Ax 0 - By 0 - C z 0 = D. Therefore, the last inequality can be written as follows: Ax + By + Cz + D > 0.
2) Take a point L(x,y) such that Ax + By + Cz + D > 0.
Let's rewrite the inequality by replacing D with (-Ax 0 - By 0 - C z 0) (since M О b 1, then Ax 0 + By 0 + C z 0 + D = 0): A(x - x 0) + B(y - y 0) + C(z - z 0) > 0.
A vector with coordinates (x - x 0,y - y 0, z - z 0) is a vector, so the expression A(x - x 0) + B(y - y 0) + C(z - z 0) can be understood , as a scalar product of vectors and . Since the scalar product of vectors and is positive, the angle between them is acute and the point L О b 1 .
Similarly, we can prove that the half-space b 2 is given by the inequality Ax + By + Cz + D< 0.
Notes.
1) It is clear that the proof given above does not depend on the choice of point M in the plane a.
2) It is clear that the same half-space can be defined by different inequalities.
The opposite is also true.
Theorem. Any linear inequality of the form Ax + By + Cz + D > 0 (or Ax + By + Cz + D< 0) (A 2 + B 2 + C 2 ≠ 0) задает в пространстве в декартовой системе координат полупространство с границей Ax + By + Cz + D = 0.
Proof.
The equation Ax + By + Cz + D = 0 (A 2 + B 2 + C 2 ≠ 0) in space defines a certain plane a (see § ...). As was proven in the previous theorem, one of the two half-spaces into which the plane divides the space is given by the inequality Ax Ax + By + Cz + D > 0.
Notes.
1) It is clear that a closed half-space can be defined by a non-strict linear inequality, and any non-strict linear inequality in the Cartesian coordinate system defines a closed half-space.
2) Any convex polyhedron can be defined as the intersection of closed half-spaces (the boundaries of which are planes containing the faces of the polyhedron), that is, analytically - by a system of linear non-strict inequalities.
Exercises.
1) Prove the two theorems presented for an arbitrary affine coordinate system.
2) Is the converse true, that any system of non-strict linear inequalities defines a convex polygon?
Exercise.1) Investigate the relative positions of two planes defined by general equations in the Cartesian coordinate system and fill out the table.
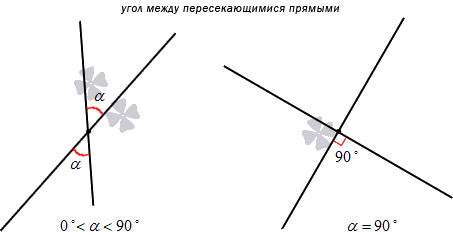
This material is devoted to such a concept as the angle between two intersecting lines. In the first paragraph we will explain what it is and show it in illustrations. Then we will look at the ways in which you can find the sine, cosine of this angle and the angle itself (we will separately consider cases with a plane and three-dimensional space), we will give the necessary formulas and show with examples exactly how they are used in practice.
In order to understand what the angle formed when two lines intersect is, we need to remember the very definition of angle, perpendicularity and point of intersection.
Definition 1
We call two lines intersecting if they have one common point. This point is called the point of intersection of two lines.
Each straight line is divided by an intersection point into rays. Both straight lines form 4 angles, two of which are vertical, and two are adjacent. If we know the measure of one of them, then we can determine the remaining ones.
Let's say we know that one of the angles is equal to α. In this case, the angle that is vertical with respect to it will also be equal to α. To find the remaining angles, we need to calculate the difference 180 ° - α. If α is equal to 90 degrees, then all angles will be right angles. Lines intersecting at right angles are called perpendicular (a separate article is devoted to the concept of perpendicularity).
Take a look at the picture:
Let's move on to formulating the main definition.
Definition 2
The angle formed by two intersecting lines is the measure of the smaller of the 4 angles that form these two lines.
An important conclusion must be drawn from the definition: the size of the angle in this case will be expressed by any real number in the interval (0, 90]. If the lines are perpendicular, then the angle between them will in any case be equal to 90 degrees.
The ability to find the measure of the angle between two intersecting lines is useful for solving many practical problems. The solution method can be chosen from several options.
To begin with, we can take geometric methods. If we know something about complementary angles, then we can relate them to the angle we need using the properties of equal or similar figures. For example, if we know the sides of a triangle and need to calculate the angle between the lines on which these sides are located, then the cosine theorem is suitable for our solution. If we have the condition right triangle, then for calculations we will also need knowledge of sine, cosine and tangent of an angle.
The coordinate method is also very convenient for solving problems of this type. Let us explain how to use it correctly.
We have a rectangular (Cartesian) coordinate system O x y, in which two straight lines are given. Let's denote them by letters a and b. The straight lines can be described using some equations. The original lines have an intersection point M. How to determine the required angle (let's denote it α) between these straight lines?
Let's start by formulating the basic principle of finding an angle under given conditions.
We know that the concept of a straight line is closely related to such concepts as a direction vector and a normal vector. If we have an equation of a certain line, we can take the coordinates of these vectors from it. We can do this for two intersecting lines at once.
The angle subtended by two intersecting lines can be found using:
- angle between direction vectors;
- angle between normal vectors;
- the angle between the normal vector of one line and the direction vector of the other.
Now let's look at each method separately.
1. Let us assume that we have a line a with a direction vector a → = (a x, a y) and a line b with a direction vector b → (b x, b y). Now let’s plot two vectors a → and b → from the intersection point. After this we will see that they will each be located on their own straight line. Then we have four options for their relative arrangement. See illustration:

If the angle between two vectors is not obtuse, then it will be the angle we need between the intersecting lines a and b. If it is obtuse, then the desired angle will be equal to the angle adjacent to the angle a →, b → ^. Thus, α = a → , b → ^ if a → , b → ^ ≤ 90 ° , and α = 180 ° - a → , b → ^ if a → , b → ^ > 90 ° .
Based on the fact that the cosines equal angles are equal, we can rewrite the resulting equalities as follows: cos α = cos a → , b → ^ , if a → , b → ^ ≤ 90 ° ; cos α = cos 180 ° - a →, b → ^ = - cos a →, b → ^, if a →, b → ^ > 90 °.
In the second case, reduction formulas were used. Thus,
cos α cos a → , b → ^ , cos a → , b → ^ ≥ 0 - cos a → , b → ^ , cos a → , b → ^< 0 ⇔ cos α = cos a → , b → ^
Let's write the last formula in words:
Definition 3
The cosine of the angle formed by two intersecting lines will be equal to modulus cosine of the angle between its direction vectors.
The general form of the formula for the cosine of the angle between two vectors a → = (a x , a y) and b → = (b x , b y) looks like this:
cos a → , b → ^ = a → , b → ^ a → b → = a x b x + a y + b y a x 2 + a y 2 b x 2 + b y 2
From it we can derive the formula for the cosine of the angle between two given straight lines:
cos α = a x b x + a y + b y a x 2 + a y 2 b x 2 + b y 2 = a x b x + a y + b y a x 2 + a y 2 b x 2 + b y 2
Then the angle itself can be found using the following formula:
α = a r c cos a x b x + a y + b y a x 2 + a y 2 b x 2 + b y 2
Here a → = (a x , a y) and b → = (b x , b y) are the direction vectors of the given lines.
Let's give an example of solving the problem.
Example 1
In a rectangular coordinate system on a plane, two intersecting lines a and b are given. They can be described by the parametric equations x = 1 + 4 · λ y = 2 + λ λ ∈ R and x 5 = y - 6 - 3. Calculate the angle between these lines.
Solution
We have a parametric equation in our condition, which means that for this line we can immediately write down the coordinates of its direction vector. To do this, we need to take the values of the coefficients for the parameter, i.e. the straight line x = 1 + 4 · λ y = 2 + λ λ ∈ R will have a direction vector a → = (4, 1).
The second straight line is described using canonical equation x 5 = y - 6 - 3 . Here we can take the coordinates from the denominators. Thus, this line has a direction vector b → = (5 , - 3) .
Next, we move directly to finding the angle. To do this, simply substitute the existing coordinates of the two vectors into the above formula α = a r c cos a x · b x + a y + b y a x 2 + a y 2 · b x 2 + b y 2 . We get the following:
α = a r c cos 4 5 + 1 (- 3) 4 2 + 1 2 5 2 + (- 3) 2 = a r c cos 17 17 34 = a r c cos 1 2 = 45 °
Answer: These straight lines form an angle of 45 degrees.
We can solve a similar problem by finding the angle between normal vectors. If we have a line a with a normal vector n a → = (n a x , n a y) and a line b with a normal vector n b → = (n b x , n b y), then the angle between them will be equal to the angle between n a → and n b → or the angle that will be adjacent to n a →, n b → ^. This method is shown in the picture:

Formulas for calculating the cosine of the angle between intersecting lines and this angle itself using the coordinates of normal vectors look like this:
cos α = cos n a → , n b → ^ = n a x n b x + n a y + n b y n a x 2 + n a y 2 n b x 2 + n b y 2 α = a r c cos n a x n b x + n a y + n b y n a x 2 + n a y 2 n b x 2 + n b y 2
Here n a → and n b → denote the normal vectors of two given lines.
Example 2
In a rectangular coordinate system, two straight lines are given using the equations 3 x + 5 y - 30 = 0 and x + 4 y - 17 = 0. Find the sine and cosine of the angle between them and the magnitude of this angle itself.
Solution
The original lines are specified using normal equations straight line of the form A x + B y + C = 0. We denote the normal vector as n → = (A, B). Let's find the coordinates of the first normal vector for one line and write them: n a → = (3, 5) . For the second line x + 4 y - 17 = 0, the normal vector will have coordinates n b → = (1, 4). Now let’s add the obtained values to the formula and calculate the total:
cos α = cos n a → , n b → ^ = 3 1 + 5 4 3 2 + 5 2 1 2 + 4 2 = 23 34 17 = 23 2 34
If we know the cosine of an angle, then we can calculate its sine using the basic trigonometric identity. Since the angle α formed by straight lines is not obtuse, then sin α = 1 - cos 2 α = 1 - 23 2 34 2 = 7 2 34.
In this case, α = a r c cos 23 2 34 = a r c sin 7 2 34.
Answer: cos α = 23 2 34, sin α = 7 2 34, α = a r c cos 23 2 34 = a r c sin 7 2 34
Let us analyze the last case - finding the angle between straight lines if we know the coordinates of the direction vector of one straight line and the normal vector of the other.
Let us assume that straight line a has a direction vector a → = (a x , a y) , and straight line b has a normal vector n b → = (n b x , n b y) . We need to set these vectors aside from the intersection point and consider all options for their relative positions. See in the picture:

If the angle between the given vectors is no more than 90 degrees, it turns out that it will complement the angle between a and b to a right angle.
a → , n b → ^ = 90 ° - α if a → , n b → ^ ≤ 90 ° .
If it is less than 90 degrees, then we get the following:
a → , n b → ^ > 90 ° , then a → , n b → ^ = 90 ° + α
Using the rule of equality of cosines of equal angles, we write:
cos a → , n b → ^ = cos (90 ° - α) = sin α for a → , n b → ^ ≤ 90 ° .
cos a → , n b → ^ = cos 90 ° + α = - sin α for a → , n b → ^ > 90 ° .
Thus,
sin α = cos a → , n b → ^ , a → , n b → ^ ≤ 90 ° - cos a → , n b → ^ , a → , n b → ^ > 90 ° ⇔ sin α = cos a → , n b → ^ , a → , n b → ^ > 0 - cos a → , n b → ^ , a → , n b → ^< 0 ⇔ ⇔ sin α = cos a → , n b → ^
Let us formulate a conclusion.
Definition 4
To find the sine of the angle between two lines intersecting on a plane, you need to calculate the modulus of the cosine of the angle between the direction vector of the first line and the normal vector of the second.
Let's write down the necessary formulas. Finding the sine of an angle:
sin α = cos a → , n b → ^ = a x n b x + a y n b y a x 2 + a y 2 n b x 2 + n b y 2
Finding the angle itself:
α = a r c sin = a x n b x + a y n b y a x 2 + a y 2 n b x 2 + n b y 2
Here a → is the direction vector of the first line, and n b → is the normal vector of the second.
Example 3
Two intersecting lines are given by the equations x - 5 = y - 6 3 and x + 4 y - 17 = 0. Find the angle of intersection.
Solution
We take the coordinates of the guide and normal vector from the given equations. It turns out a → = (- 5, 3) and n → b = (1, 4). We take the formula α = a r c sin = a x n b x + a y n b y a x 2 + a y 2 n b x 2 + n b y 2 and calculate:
α = a r c sin = - 5 1 + 3 4 (- 5) 2 + 3 2 1 2 + 4 2 = a r c sin 7 2 34
Please note that we took the equations from the previous problem and obtained exactly the same result, but in a different way.
Answer:α = a r c sin 7 2 34
Let us present another way to find the desired angle using the angular coefficients of given straight lines.
We have a line a, which is defined in a rectangular coordinate system using the equation y = k 1 x + b 1, and a line b, defined as y = k 2 x + b 2. These are equations of lines with slopes. To find the angle of intersection, we use the formula:
α = a r c cos k 1 · k 2 + 1 k 1 2 + 1 · k 2 2 + 1, where k 1 and k 2 are the slopes of the given lines. To obtain this record, formulas for determining the angle through the coordinates of normal vectors were used.
Example 4
There are two straight lines intersecting in a plane, given by equations y = - 3 5 x + 6 and y = - 1 4 x + 17 4 . Calculate the value of the intersection angle.
Solution
The angular coefficients of our lines are equal to k 1 = - 3 5 and k 2 = - 1 4. Let's add them to the formula α = a r c cos k 1 k 2 + 1 k 1 2 + 1 k 2 2 + 1 and calculate:
α = a r c cos - 3 5 · - 1 4 + 1 - 3 5 2 + 1 · - 1 4 2 + 1 = a r c cos 23 20 34 24 · 17 16 = a r c cos 23 2 34
Answer:α = a r c cos 23 2 34
In the conclusions of this paragraph, it should be noted that the formulas for finding the angle given here do not have to be learned by heart. To do this, it is enough to know the coordinates of the guides and/or normal vectors of given lines and be able to determine them using different types of equations. But it’s better to remember or write down the formulas for calculating the cosine of an angle.
How to calculate the angle between intersecting lines in space
The calculation of such an angle can be reduced to calculating the coordinates of the direction vectors and determining the magnitude of the angle formed by these vectors. For such examples, the same reasoning that we gave before is used.
Let's assume that we have a rectangular coordinate system located in three-dimensional space. It contains two straight lines a and b with an intersection point M. To calculate the coordinates of the direction vectors, we need to know the equations of these lines. Let us denote the direction vectors a → = (a x , a y , a z) and b → = (b x , b y , b z) . To calculate the cosine of the angle between them, we use the formula:
cos α = cos a → , b → ^ = a → , b → a → b → = a x b x + a y b y + a z b z a x 2 + a y 2 + a z 2 b x 2 + b y 2 + b z 2
To find the angle itself, we need this formula:
α = a r c cos a x b x + a y b y + a z b z a x 2 + a y 2 + a z 2 b x 2 + b y 2 + b z 2
Example 5
We have a line defined in three-dimensional space using the equation x 1 = y - 3 = z + 3 - 2. It is known that it intersects with the O z axis. Calculate the intercept angle and the cosine of that angle.
Solution
Let us denote the angle that needs to be calculated by the letter α. Let's write down the coordinates of the direction vector for the first straight line – a → = (1, - 3, - 2) . For the applicate axis, we can take the coordinate vector k → = (0, 0, 1) as a guide. We have received the necessary data and can add it to the desired formula:
cos α = cos a → , k → ^ = a → , k → a → k → = 1 0 - 3 0 - 2 1 1 2 + (- 3) 2 + (- 2) 2 0 2 + 0 2 + 1 2 = 2 8 = 1 2
As a result, we found that the angle we need will be equal to a r c cos 1 2 = 45 °.
Answer: cos α = 1 2 , α = 45 ° .
If you notice an error in the text, please highlight it and press Ctrl+Enter